TU Wien | ZID | ZIDline 10 | ADAMS
Heinz-Bodo Schmiedmayer, Martin Weigel
Institut für Mechanik, TU Wien
Computerprogramme zur Simulation von Mehrkörpersystemen (MKS) haben in den letzten Jahren stark an Bedeutung gewonnen. Im Gegensatz zu Finite-Elemente-Programmen, die schon seit einiger Zeit zu einem Standardwerkzeug in vielen Bereichen des Ingenieurwesens zählen, ist MKS-Software erst in den letzten Jahren stärker in Erscheinung getreten. Mittlerweile ist sie speziell durch die Einbettung in Computer-Aided-Engineering (CAE) Umgebungen überall dort zu einem unverzichtbaren Tool geworden, wo es um die Simulation des dynamischen Verhaltens von komplexen Mechanismen mit großem Bewegungsumfang geht.
Die theoretischen Grundlagen der meisten MKS-Softwarepakete basieren auf den Newton-Euler bzw. den D'Alambertschen Formulierungen der Dynamik und sind vom Prinzip her seit dem späten achtzehnten Jahrhundert bekannt. Deren Anwendung auf komplexe und umfangreiche Mehrkörpersysteme ist aber erst durch die moderne Computertechnik und die Entwicklung spezieller numerischer Methoden zur Lösung differential-algebraischer Gleichungssysteme ermöglicht worden [1]. Die Schwierigkeiten bei der numerischen Lösung von differential-algebraischen Gleichungssystemen war wohl auch mit ein Grund, warum die MKS-Programme noch nicht so weit verbreitet sind wie die FE-Systeme.
Mit dem neuen Studienplan Maschinenbau wurden im Jahr 2001 die numerischen Ingenieursmethoden dadurch aufgewertet, dass einerseits die Finiten Elemente als Pflichtfach eingeführt wurden und andererseits alle Studierenden des Maschinenbaus entweder numerische Methoden der Strömungsmechanik bzw. Mehrkörpersystemsdynamik als Wahlfächer des zweiten Studienabschnittes zu absolvieren haben. Gleichzeitig mit dieser Einführung ergab sich die Notwendigkeit, dass für die Ausbildung ein entsprechendes Software-Paket für die MKS-Simulation zur Verfügung steht. Das Institut für Mechanik hat daher im vergangenen Studienjahr beim Zentralen Informatikdienst angeregt, das Softwarepaket ADAMS, das mittlerweile von der Firma MSC (www.mscsoftware.com) vertrieben und weiter entwickelt wird, im Rahmen einer Campus-Lizenz zu erwerben.
Das Institut für Mechanik hat über die letzten Jahre Erfahrungen mit drei zum Teil recht unterschiedlichen MKS-Systemen gesammelt. Neben ADAMS, sind die Softwarepakete DADS der Firma LMS (www.lmsintl.com) und SIMPACK (www.simpack.de) lizenziert. Letzteres wurde von der DLR entwickelt und wird derzeit im Rahmen einer Kooperation mit Siemens-Verkehrstechnik bei der Simulation von Schienenfahrzeugen eingesetzt. Das Softwarepaket DADS war das erste MKS-Programm, für das am Institut eine Lizenz beschafft und das auch in der Lehre eingesetzt wurde. Derzeit werden hauptsächlich biomechanische Problemstellungen mit DADS bearbeitet. Die Entscheidung mit ADAMS zu arbeiten war nicht zuletzt darin begründet, dass ADAMS Marktführer im Bereich MKS-Simulation ist und darüber hinaus viele Kooperationspartner des Institutes dieses Produkt einsetzen. Nicht zuletzt soll dadurch den Studierenden die Möglichkeit geboten werden, mit einem in der Praxis eingesetzten "State-of-the-Art" Werkzeug umgehen zu lernen.
Zum Aufstellen der Bewegungsgleichungen verwendet ADAMS die Euler-Lagrangeschen Gleichungen in der folgenden Form:
![]()
wobei die Lagrange-Funktion ![]() die Differenz zwischen kinetischer Energie
die Differenz zwischen kinetischer Energie
![]() und potentieller Energie
und potentieller Energie ![]() darstellt. Die
darstellt. Die ![]() mit
mit ![]() sind die verallgemeinerten
Lagekoordinaten des aus
sind die verallgemeinerten
Lagekoordinaten des aus ![]() Körpern bestehenden Mehrkörpersystems. In ADAMS
wird die Lage jedes Körpers durch die Position des Massenmittelpunktes
und die Orientierung mittels der drei Eulerwinkel beschrieben. Diese Lagekoordinaten
unterliegen im Allgemeinen den
Körpern bestehenden Mehrkörpersystems. In ADAMS
wird die Lage jedes Körpers durch die Position des Massenmittelpunktes
und die Orientierung mittels der drei Eulerwinkel beschrieben. Diese Lagekoordinaten
unterliegen im Allgemeinen den ![]() holonomen Zwangsbedingungen
holonomen Zwangsbedingungen
![]() .
.
Die Nebenbedingungen werden über die Lagrange-Parameter ![]() direkt in die
Bewegungsgleichung übernommen, wobei die
direkt in die
Bewegungsgleichung übernommen, wobei die ![]() den verallgemeinerten Reaktions-
kräften in den Gelenken entsprechen. Zur Eingabe der Zwangsbedingungen
werden eine Vielzahl von Gelenken (Scharniergelenk, Schubgelenk, Kugelgelenk,
&...) aber auch allgemeinere Formulierungen (Sperre oder Kopplung von Freiheitsgraden)
zur Verfügung gestellt. Dabei ist jedoch stets darauf zu achten, dass die
Formulierung der Zwangsbedingungen nicht redundant ist. Allenfalls kann
es bei der numerischen Integration des Systems zu Problemen kommen.
den verallgemeinerten Reaktions-
kräften in den Gelenken entsprechen. Zur Eingabe der Zwangsbedingungen
werden eine Vielzahl von Gelenken (Scharniergelenk, Schubgelenk, Kugelgelenk,
&...) aber auch allgemeinere Formulierungen (Sperre oder Kopplung von Freiheitsgraden)
zur Verfügung gestellt. Dabei ist jedoch stets darauf zu achten, dass die
Formulierung der Zwangsbedingungen nicht redundant ist. Allenfalls kann
es bei der numerischen Integration des Systems zu Problemen kommen.
Für die vollständige Formulierung sind nun noch die ![]() externen Kräfte
externen Kräfte ![]() mit
den Kraftangriffspunkten
mit
den Kraftangriffspunkten ![]() in den Bewegungsgleichungen zu berücksichtigen.
in den Bewegungsgleichungen zu berücksichtigen.
Ausgehend von der oben beschriebenen Formulierung erhält man einen Satz von differential-algebraischen Gleichungen (DAE) zweiter Ordnung vom Index3, zu deren Lösung je nach Modell in ADAMS unterschiedliche Integratoren zur Verfügung stehen. So werden Integratoren für steife Systeme mit fixer oder variabler Schrittweite und solche für nicht-steife Systeme mit variabler Schrittweite zur Verfügung gestellt. Auch hier bedarf es einiger Erfahrung, um für das behandelte Problem die geeignete Auswahl zu treffen.
Neben der Formulierung von Mehrkörpersystemen bietet ADAMS auch die Möglichkeit, einfache Regelsysteme in die Simulation mit ein zu beziehen bzw. durch Anbindung an externe Simulationsprogramme wie MATLAB komplexe Regelsysteme mit der MKS-Formulierung in ADAMS zusammen zu führen. Grundsätzlich ist an zu merken, dass ADAMS aus einer Vielzahl von Modulen besteht, die für verschiedenste Anwendungsbereiche optimiert sind. Neben dem allgemeinen MKS-Tool ADAMS/View werden noch spezielle Module wie etwa ADAMS/Car zur Modellierung von Kraftfahrzeugen, ADAMS/Rail für Schienenfahrzeuge, zur Verfügung gestellt. Einen genauen Überblick über die Vielfalt und den Anwendungsbereich der einzelnen Module kann man sich auf der bereits oben genannten Homepage der Firma MSC machen.
Für die Beurteilung des dynamischen Fahrverhaltens von Kraftfahrzeugen ist auch das Verhalten des Fahrers mit ein zu beziehen. Zwar existieren für den PKW etliche Modelle, die auch als so genannte "Fahrermodelle" verfügbar sind, doch sind diese im Bereich LKW und Sattelschleppzug nicht oder nur eingeschränkt anwendbar, da hier die Bahnplanung und Vorausschau zusätzlichen Randbedingungen unterliegen. So unterscheidet sich das Fahrverhalten eines Sattelschleppers grundsätzlich von dem eines zweiachsigen Fahrzeuges und auch der Beladungszustand des Zugverbandes kann im Bereich einer ganzen Größenordnung variieren. Der grundsätzliche Aufbau des Fahrermodells ist in Abbildung 1 dargestellt.
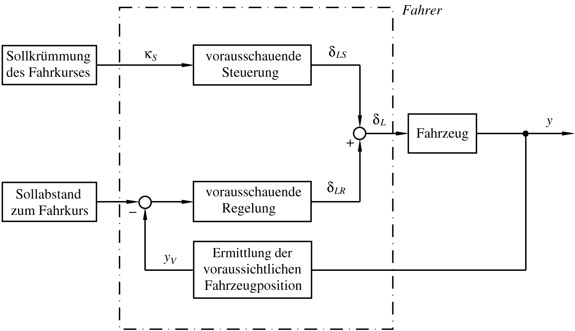
Abbildung 1: Systembeschreibung des Fahrer-Fahrzeugmodells.
Das Fahrzeug wurde dabei unter Verwendung von in ADAMS/Car zur Verfügung stehenden Templates für die Radaufhängungen, Reifen, Lenkung und Antriebsstrang formuliert. Der assemblierte Sattelschleppzug ist in der Abbildung 2 dargestellt. Untersucht wurde nun das Fahrverhalten des Zugverbandes bei unterschiedlichen Bela-dungssituationen (15% und 80% des maximal zulässigen Höchstgewichtes) mit zwei unterschiedlichen Fahrermodellen. Es konnte dabei gezeigt werden, dass es mit einem Fahrer, der für die Zugmaschine alleine ausgelegt wurde, im Falle des zu 80% beladenen Sattelschleppzuges bei der Einfahrt in eine Kurve zu instabilem Aufschaukeln in Querrichtung kommt [2].

Abbildung 2: Der Sattelschleppzug in ADAMS/Car.
Neben dem Institut für Mechanik wird das Programmsystem ADAMS auch am Institut für Maschinendynamik und Messtechnik sowie am Institut für Fördertechnik eingesetzt. Gerade durch die Einbeziehung von MKS in den Studienplan Maschinenbau ist zu hoffen, dass in Zukunft die MKS-Simulation einen ähnlichen Verbreitungsgrad erhält wie dies die FE-Berechnung heute schon hat.
[1] K.E. Brenan, S.L. Campbell, L.R. Petzold, Numerical Solution of Initial-Value Problems in Differential-Algebraic Equations, North-Holland, 1989.
[2] M. Weigel, P. Lugner, M. Plöchl, A Driver Model for a Truck-Semitrailer Combination. In: Proceedings of the IAVSD 2003, Supplement to Vehicle System Dynamics (in Press).